Getting Started with the Microsoft Robotics Studio Simulator
The MicroSoft Visual Programming Language can be used to control simulated robots in a virtual 3D world as well physical robots in the real world.
Here's how to get started with using the simulator.
Remotely Controlling a Simulated NXT Tribot in the Virtual World
To start the simulator, go to: Windows Start Menu > All Programs > Microsoft Robotics Studio > Visual SImulation Environment > Lego NXT Tribot Simulation
A Windows command line window will start up, followed by the simulator window will appear, and a dashboard panel. Note that the dashboard may be hidden behind the main simulator window.
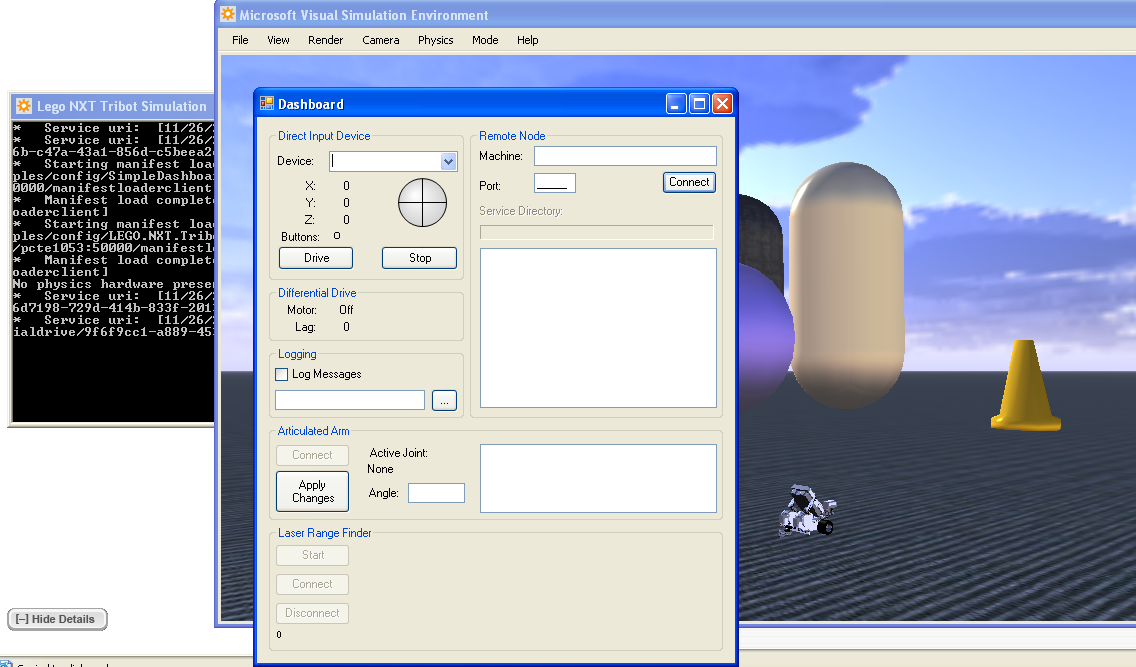
To start the robot, enter localhost as the Machine name in the Dashboard window, and then double click on the (LegoNXTMotorBase) service that should start. The Motor status should now switch to On. Click on the Drive button and use the "track ball" to drive the simulated Tribot around.
Programming the Simulated Robot
The next step is to control the simulated robot using a VPL program: Robotics Tutorial 4 (VPL) - Drive-By-Wire describes how to create a screen based directional dialogue controller that will talk to the simulated robot. You only need to use the code that is connected to the Direction dialogue - you do not need the two blocks that connect an Xinputcontroller to the differential drive.
The program is a generic one; to get it to run with the simulator, you need to set the configuration of the Generic Drive as follows: from the Use a Manifest option, select Import Manifest, and then select LEGO.NXT.Tribot.Simulation.manifest.xml . When you run the program (click on the green Start/play button in the VPL toolbar) the simulator window will open along with a Direction dialogue window. Here is a copy of the project with the manifest already defined:  driveByWireSimulator.zip. Download this file, unzip it to a folder, and double click on the driveByWIreSimulator MVPL icon to launch VPL. Hit the Play button to start the programme and launch the simulator.
driveByWireSimulator.zip. Download this file, unzip it to a folder, and double click on the driveByWIreSimulator MVPL icon to launch VPL. Hit the Play button to start the programme and launch the simulator.
Comments (0)
You don't have permission to comment on this page.